1.5 KiB
ArduSub Tuning
Basic Tuning
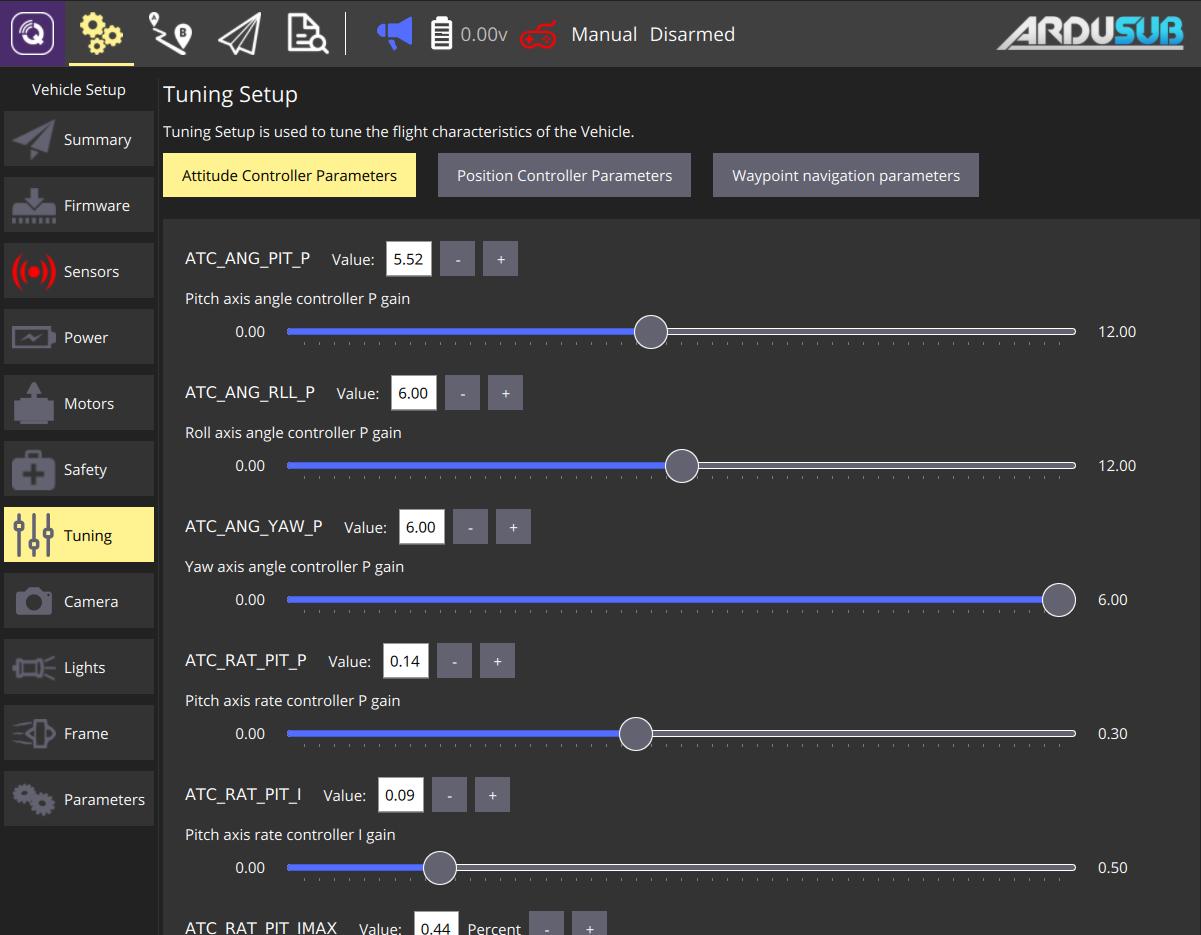
This page allows changing the PID controller gains to better suit your vehicle and application. Changing these may help you get a snappier response for more precise movements, or a smoother response for recording cinematic footages. Adjust a parameter by moving the desired slider, or by clicking the increase/decrease buttons. There are three controllers that can be adjusted here:
-
Attitude Controller Parameters are the parameters for the controller responsible for keeping the vehicle oriented as you want it, assuming your vehicle has ability (enough motors/DOF) to do so.
-
Position Controller Parameters are the parameters for the controller responsible for positioning the vehicle at a point in 3D space. The Z parameters control how the depth control works (eg in Depth Hold mode). The XY parameters affect how the vehicle controls the horizontal position in Position Enabled modes.
-
Waypoint Navigation Parameters are the parameters for the controller responsible for following waypoints in Auto and Guided mode.
::: warning Guided and Auto modes are currently unsupported and some features are disabled in QGC. :::