13 KiB
조이스틱 설정
_QGroundControl_은 RC 송신기 대신 조이스틱이나 게임패드로 기체를 조종할 수 있습니다.
:::info 조이스틱(또는 가상 썸스틱)으로 비행하려면 조이스틱 정보가 MAVLink로 전송되기 때문에 기체가 조이스틱에 반응하기 위하여 안정적인 고대역폭 원격 측정 채널이 필요합니다. :::
:::info 조이스틱과 게임패드 지원은 이기종 플랫폼 SDL2 라이브러리를 사용하여 활성화됩니다. 특정 컨트롤러와의 호환성은 SDL에 따라 다릅니다(해당 API에 의해 노출되는 모든 버튼은 QGroundControl UI를 통하여 표시됨). 일반적인 조이스틱과 게임패드들은 호환됩니다. :::
:::info 조이스틱은 보정 프로세스의 마지막 단계로 _활성화_됩니다. :::
PX4 조이스틱 활성화
PX4에서 조이스틱 지원을 활성화하려면 매개변수 [COM_RC_IN_MODE](http://localhost:8080/px4_user_guide/en을 1</0)로 설정합니다. 이 매개변수가 <code>0이면 _조이스틱_이 설정 옵션으로 제공되지 않습니다.
This is enabled by default for PX4 SITL builds (see the Parameters topic for information on how to find and set a particular parameter).
Ardupilot 조이스틱 지원
ArduPilot 기체에서 지원됩니다. 매개변수 설정은 필요하지 않습니다.
조이스틱 설정
조이스틱을 설정하려면:
-
Start QGroundControl and connect to a vehicle.
-
USB 포트에 조이스틱이나 게임패드를 연결합니다.
-
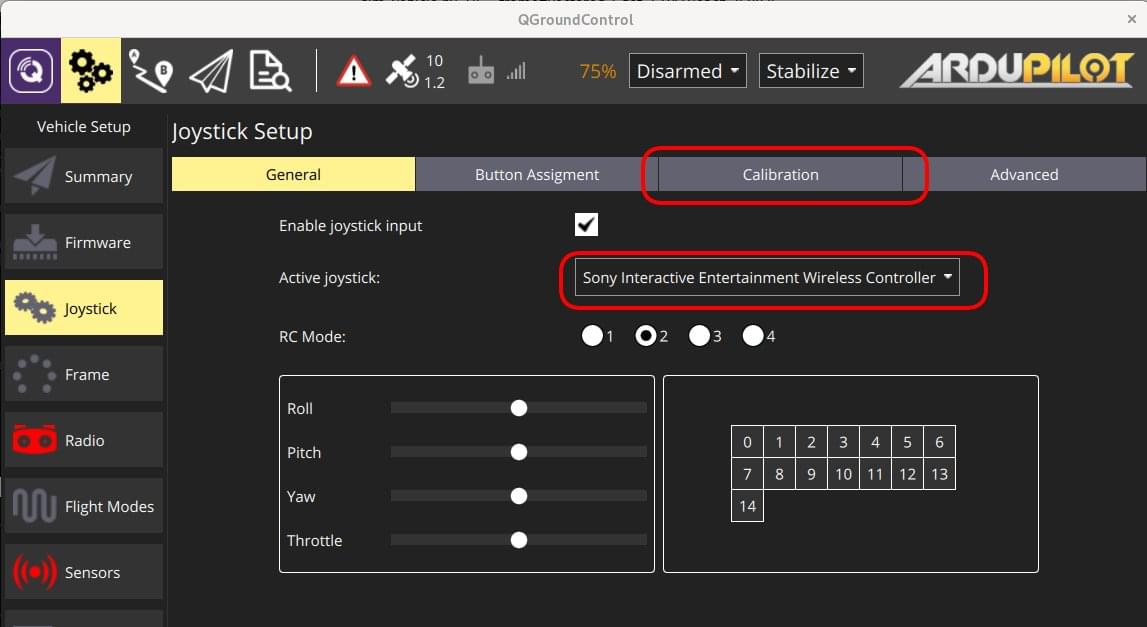
상단 도구 모음에서 톱니 바퀴 아이콘(기체 설정)을 선택한 다음 가장자리 표시줄에서 조이스틱을 선택하십시오. 아래의 화면이 표시됩니다.
-
활성화된 조이스틱 드롭다운에서 조이스틱이 선택 여부를 확인합니다.
-
교정 탭으로 이동하여 시작 버튼을 클릭하여 다음 화면의 지시에 따라 스틱을 교정하고 이동합니다.

조이스틱은 보정 프로세스의 마지막 단계에서 _활성화_됩니다.
-
버튼과 스틱이 의도한 대로 작동하는지 테스트하고 일반 탭의 축과 버튼 모니터에서 결과를 확인합니다.
-
각 조이스틱 버튼으로 활성화되는 비행 모드와 차량의 기능을 선택합니다.


Advanced Options
고급 탭에서 몇 가지 추가 옵션을 사용할 수 있습니다. 이러한 옵션은 특이하고 비정상적인 설정, 감도 증가 및 시끄러운 조이스틱 처리에 유용합니다.
스로틀 옵션

- 조이스틱의 중앙을 스로틀 0으로 설정: MANUAL_CONTROL z에서 중앙 또는 아래로 향한 스틱은 0을 전송하고, 위로 올린 스틱은 1000을 전송합니다.
- 스프링 로드 스로틀 스무딩: 이 모드에서는 스로틀 자체가 아니라 스로틀이 증감하는 속도를 제어합니다. 이것은 사용자가 원하는 스로틀을 잡고 스틱을 놓을 수 있으므로, 스로틀 스틱에 스프링이 장착된 설정에 유용합니다.
- 풀다운 스틱은 제로 스로틀: 이 모드에서 스틱을 내리면 MANUAL_CONTROL z에서 0, 중앙에 500, 올리면 1000이 전송됩니다.
- 음수 추력 허용: 중앙 스틱이 0 스로틀 모드에 있을 때 사용자가 스틱을 내려 음수 값을 전송할 수 있습니다. 내려진 스틱은 MANUAL_CONTROL z에서 -1000을 전송하고, 중앙에 있는 스틱은 0을 전송하고, 올려진 스틱은 1000을 전송합니다. 이 모드는 Rover와 같이 음의 추력을 지원하는 차량에만 사용할 수 있습니다.
Expo
엑스포 슬라이더를 사용하면 스틱을 중앙에서 덜 민감하게 만들어 이 영역에서 더 세밀하게 제어할 수 있습니다.

슬라이더는 지수 곡선의 곡률을 조정합니다.

엑스포 값이 높을수록 곡선은 중앙에서 더 평평해지고 가장자리에서 더 가파르게 됩니다.
고급 설정
고급 설정은 일반 사용자에게는 권장되지 않습니다. 잘못 사용하면 예상치 못한 결과를 초래할 수 있습니다.
고급 설정
다음과 같은 설정을 사용할 수 있습니다:
-
짐벌 제어 활성화: 짐벌을 제어하기 위한 활성화된 두 개의 추가 채널
-
조이스틱 모드: 조이스틱이 실제로 제어하는 것과 차량에 전송되는 MAVLink 메시지를 변경합니다.
- 일반: 일반 RC 라디오를 사용하는 것처럼 사용자가 제어하며, MAVLink MANUAL_CONTROL 메시지를 사용합니다.
- 자세: 사용자가 차량의 자세를 제어하며 MAVLink SET_ATTITUDE_TARGET 메시지를 사용합니다.
- MAVLink SET_POSITION_TARGET_LOCAL_NED 메시지에는 위치에 대한 비트마스크만을 사용합니다.
- MAVLink SET_POSITION_TARGET_LOCAL_NED 메시지는 force 전용 비트마스크를 사용합니다.
- 속도: 사용자가 차량에 가해지는 힘을 제어하며, 속도에 대한 비트마스크가 있는 MAVLink SET_POSITION_TARGET_LOCAL_NED 메시지를 사용합니다.
-
축 주파수: 조이스틱이 유휴 상태일 때(입력이 변경되지 않음) 조이스틱 명령이 5Hz로 차량에 전송됩니다. 조이스틱이 사용 중일 때(입력 값이 변경됨) 조이스틱 명령은 이 설정에 의한 (더 높은) 주파수가 기체에 전송됩니다. 기본값은 25Hz입니다.
-
버튼 주파수: 반복되는 버튼 동작이 전송되는 주파수를 제어합니다.
-
원 수정 사용: RC 컨트롤러 스틱은 정사각형을 나타내는 반면 조이스틱은 일반적으로 원을 나타냅니다. 이 옵션이 활성화되면 사각형이 조이스틱 이동 영역 내부에 새겨져 RC 컨트롤러와 비슷해집니다(그래서 네 모서리 모두에 도달할 수 있음). 효과적인 스틱 이동이 감소하므로 비용이 감소합니다.
-
비활성화: 비활성화시에는 조이스틱 위치가 변경되지 않고 차량으로 전송됩니다(조이스틱 장치에서 읽는 방식). 일부 조이스틱에서 (롤, 피치) 값은 정사각형 내부에 새겨진 원의 공간으로 제한됩니다. 이 그림에서 지점 B는 전체 피치 앞으로 및 전체 롤 오른쪽을 명령하지만 리테이너가 원형이기 때문에 조이스틱이 지점 B에 도달할 수 없습니다. 이는 전체 롤 및 피치 편향을 동시에 달성할 수 없음을 의미합니다.

-
활성화: 조이스틱 값은 명령의 전체 범위를 보장하기 위해 소프트웨어에서 조정됩니다. 그러나 그림에서 회색으로 강조 표시된 영역이 더 이상 사용되지 않기 때문에 사용 가능한 이동 영역 및 해상도가 감소합니다.

-
-
불감대: 불감대를 사용하면 스틱이 중립 위치 근처에 있을 때 입력 변경 사항을 무시할 수 있습니다. 이것은 명령으로 해석될 수 있는 민감한 스틱의 소음이나 작은 진동을 피하는 데 도움이 되며, 스틱이 중앙으로 잘 돌아오지 않을 때 작은 오프셋을 제거할 수 있습니다. 보정의 첫 번째 단계에서 조정하거나 해당 축 모니터에서 수직으로 드래그하여 조정할 수 있습니다.
지원되는 조이스틱
다음 조이스틱들은 최근 버전의 QGroundControl 빌드에서 작동합니다.
소니 플레이스테이션 3/4 컨트롤러
이 두 조이스틱을 모두 사용하는 것이 좋습니다. "즉시" 잘 작동하며 비행 모드에 매핑할 수 있는 버튼들이 있습니다.
Sony PS4 - DualShock 4 컨트롤러 V2(무선 설정)
이 컨트롤러는 USB 및 Bluetooth 무선 연결을 모두 지원합니다. 유선 USB 연결은 일반적으로 즉시 사용할 수 있습니다. 무선 연결에는 몇 가지 설정이 필요합니다.
리눅스 우분투 설정
컨트롤러가 Linux에서 무선 환경에서 작동하도록 하려면 jstest-gtk 및 ds4drv 유틸리티를 설치하여야 합니다.
과정은 다음과 같습니다:
- _QGroundControl_을 실행후, 기체를 연결합니다.
_jstest-gtk_ 설치: `sudo apt install jstest-gtk` - 매개변수의 검색 및 설정 방법은 매개변수를 참고하십시오.
_ds4drv_ 설치: `sudo pip install ds4drv` - ds4drv 실행
sudo ds4drv엑스포 - 컨트롤러 LED가 빠르게 깜박이기 시작할 때까지 공유 버튼을 누른 다음 PS 버튼을 길게 누릅니다. 그다음에는 _ds4drv_가 새 기기를 감지하여야 합니다.
- 마지막으로 jstest-gtk 유틸리티를 실행하여 컨트롤러 설정을 확인합니다.
FrSky 타라니스 XD9 플러스
FrSky Taranis XD9 plus 리모컨도 조이스틱으로 연결할 수 있습니다. 뒷면의 USB 포트로 연결합니다.
Taranis는 버튼 옵션을 사용하는 것을 허용되지 않습니다(정확히 말하면 옵션을 설정할 수 있지만, 송신기의 버튼을 토글하여도 작동하지 않습니다).
:::info Taranis는 공개적으로 작업 중인 개방형 시스템입니다. 작성 시점에 조이스틱으로 효과적으로 작동할 수 있는 펌웨어나 설정이 있을 수 있습니다. :::
로지텍 게임패드 F310
Logitech Gamepad F310은 MacOS "Sierra"에서 USB를 통해 테스트되었습니다.
로지텍 익스트림 3D 프로
Logitech Extreme 3D Pro 조이스틱은 모든 플랫폼(Linux, Windows, Mac OSX)에서 테스트되었습니다. 이것은 또한 비틀 수 있는 단일 스틱 컨트롤러입니다. 주 스틱 축은 피치 및 롤에 사용되는 반면 트위스트 동작은 요에 사용됩니다. 스로틀은 별도의 휠에 매핑됩니다.
로지텍 F710 게임패드
이 게임패드는 QGroundControl에서 수동 멀티콥터조종에 적합합니다. Windows, Linux 및 Mac OS에서 작동합니다.
Mac OS Leopard / Lion 설정
F710은 Leopard / Lion에서 감지되지만, 자동으로 설정되지 않습니다. 작동하는 구성을 얻으려면 F710이 _Rumblepad2_로 인식되어야 합니다.
먼저 Apple > 이 Mac에 관하여 > 추가 정보 > 시스템 보고서 > USB에서 인식 방법을 확인합니다. "Logitech Cordless RumblePad 2"로 감지되면 더 이상 수행할 필요는 없습니다.
"Logitech Wireless 710"으로 감지되면 다음 단계를 수행하십시오.
- 게임 패드의 USB 수신기를 뽑습니다.
- USB 포트에 빠르게 연결할 준비를 합니다.
- Logitech 버튼을 누르십시오(패드 중앙에 Logitech 로고가 있는 은색).
- USB 수신기를 Mac에 빠르게 연결
- 이제 패드가 시스템 보고서에서 "Logitech Cordless RumblePad 2"로 감지되어야 합니다. 실패하는 경우에는 위의 단계를 다시 시도하십시오.