11 KiB
Safety Setup (ArduPilot)
The Safety Setup page allows you to configure (vehicle specific) failsafe settings.
:::tip The setup page covers the most important safety options; other failsafe settings can be set via the parameters described in the failsafe documentation for each vehicle type. :::
:::tip QGroundControl does not support polygon fences or rally points on ArduPilot. :::
Copter
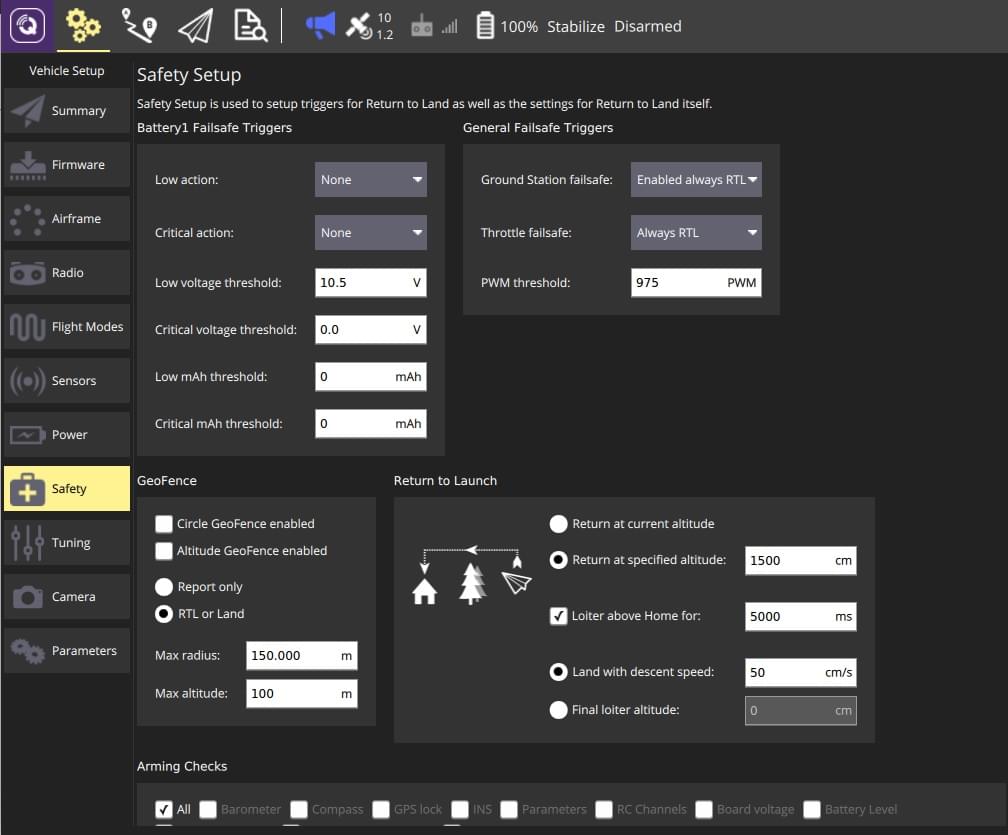
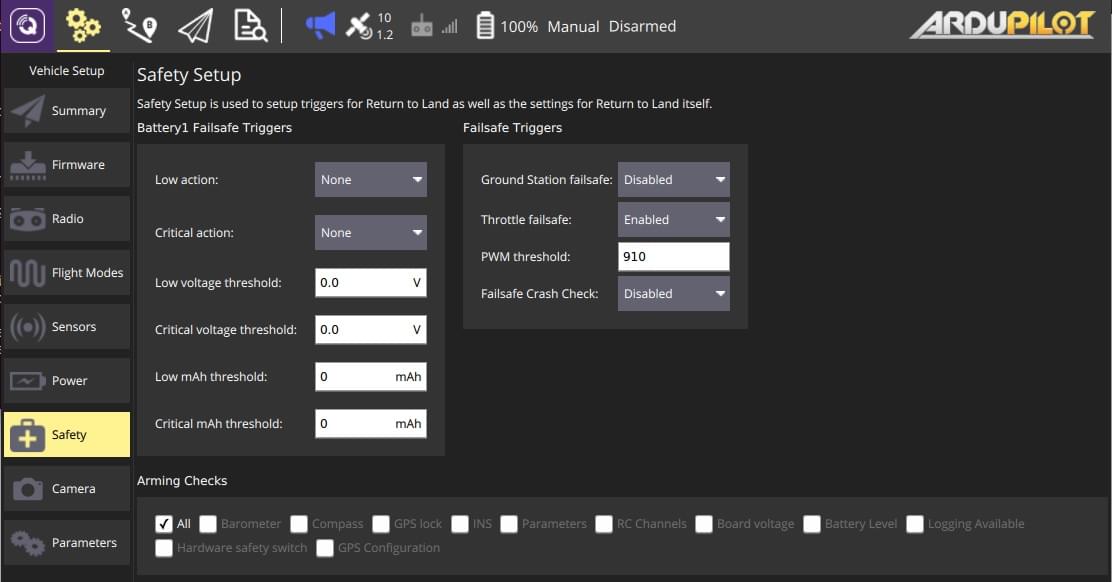
The Copter safety page is shown below.
:::info For additional safety settings and information see: Failsafe. :::
Battery Failsafe {#battery_failsafe_copter}
This panel sets the Battery Failsafe parameters. You can set low and critical thresholds for voltage and/or remaining capacity and define the action if the failsafe value is breached. The thresholds can be disabled by setting them to zero.
:::tip If there is a second battery (enabled in the Power Setup) a second panel will be displayed with the same settings. :::

The configuration options are:
- Low action (BATT_FS_LOW_ACT) - Select one of: None, Land, RTL, SmartRTL, SmartRTL or Land, Terminate.
- Critical action (BATT_FS_CRT_ACT) - Select one of: None, Land, RTL, SmartRTL, SmartRTL or Land, Terminate.
- Low voltage threshold (BATT_LOW_VOLT) - Battery voltage that triggers the low action.
- Critical voltage threshold (BATT_CRT_VOLT)- Battery voltage that triggers the critical action.
- Low mAh threshold (BATT_LOW_MAH) - Battery capacity that triggers the low action.
- Critical mAh threshold (BATT_CRT_MAH) - Battery capacity that triggers the critical action.
General Failsafe Triggers {#failsafe_triggers_copter}
This panel enables the GCS Failsafe and enables/configures the throttle failsafe.
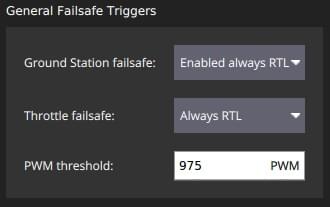
The configuration options are:
- Ground Station failsafe - Disabled, Enabled always RTL, Enabled Continue with Mission in Auto Mode, Enabled Always SmartRTL or RTL, Enabled Always SmartRTL or Land.
- Throttle failsafe - Disabled, Always RTL, Continue with Mission in Auto Mode, Always land.
- PWM Threshold (FS_THR_VALUE) - PWM value below which throttle failsafe triggers.
Geofence {#geofence_copter}
This panel sets the parameters for the cylindrical Simple Geofence. You can set whether the fence radius or height are enabled, the maximum values for causing a breach, and the action in the event of a breach.
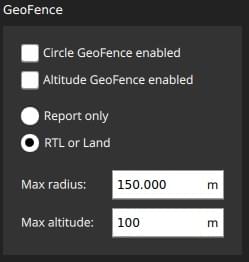
The configuration options are:
- Circle GeoFence enabled (FENCE_TYPE, FENCE_ENABLE) - Enable the circular geofence.
- Altitude GeoFence enabled (FENCE_TYPE, FENCE_ENABLE) - Enable altitude geofence.
- Fence action (FENCE_ACTION) One of:
- Report only - Report fence breach.
- RTL or Land - RTL or land on fence breach.
- Max radius (FENCE_RADIUS) - Circular fence radius that when broken causes RTL.
- Max altitude (FENCE_ALT_MAX)- Fence maximum altitude to trigger altitude geofence.
Return to Launch {#rtl_copter}
This panel sets the RTL Mode behaviour.

The configuration options are:
- Select RTL return altitude (RTL_ALT):
- Return at current altitude - Return at current altitude.
- Return at specified altitude - Ascend to specified altitude to return if below current altitude.
- Loiter above home for (RTL_LOIT_TIME) - Check to set a loiter time before landing.
- One of
- Land with descent speed (LAND_SPEED) - Select final descent speed.
- Final loiter altitude (RTL_ALT_FINAL) - Select and set final altitude for landing after RTL or mission (set to 0 to land).
Arming Checks {#arming_checks_copter}
This panel sets which Pre-ARM Safety Checks are enabled.

The configuration options are:
- Arming Checks to perform (ARMING_CHECK) - Check all appropriate: Barometer, Compass, GPS lock, INS, Parameters, RC Channels, Board voltage, Battery Level, Airspeed, Logging Available, Hardware safety switch, GPS Configuration, System.
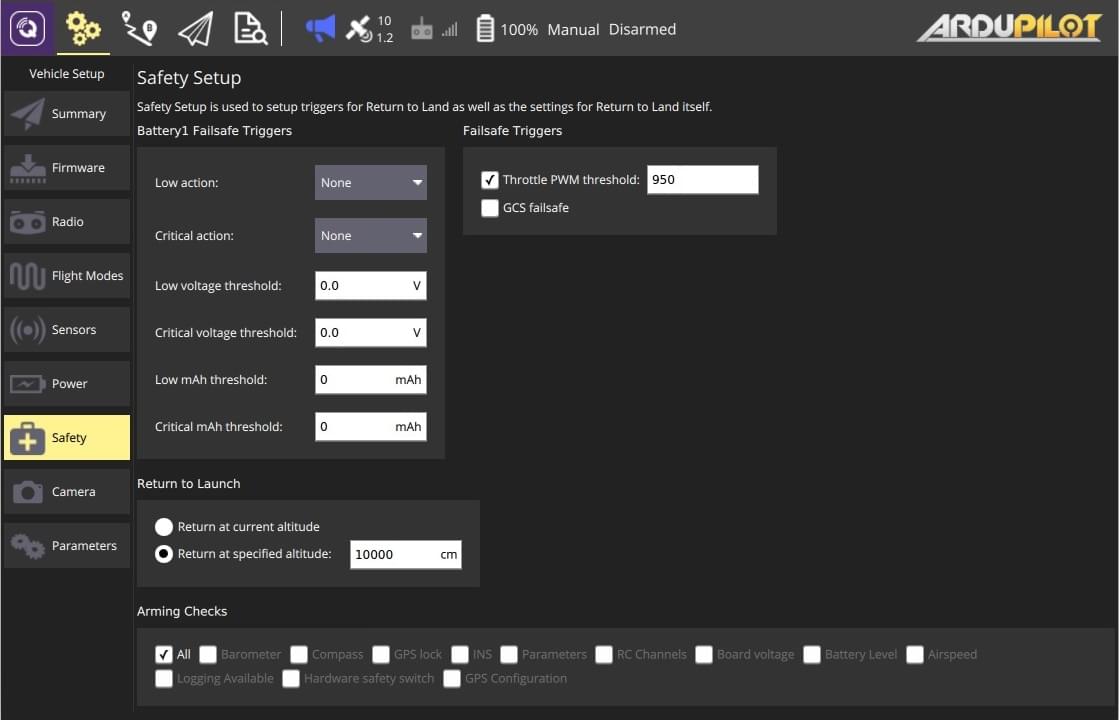
Plane
The Plane safety page is shown below.
:::info For additional safety settings and information see: Plane Failsafe Function and Advanced Failsafe Configuration. :::
Battery Failsafe {#battery_failsafe_plane}
The plane battery failsafe is the same as for copter except there are different options for the Low and Critical actions: None, RTL, Land, Terminate.
For more information see: battery failsafe (copter).
Failsafe Triggers {#failsafe_triggers_plane}
This panel enables the GCS Failsafe and enables/configures the throttle failsafe.

The configuration options are:
- Throttle PWM threshold (THR_FS_VALUE) - PWM value below which throttle failsafe triggers.
- GCS failsafe (FS_GCS_ENABL) - Check to enable GCS failsafe.
Return to Launch {#rtl_plane}
This panel sets the RTL Mode behaviour.

The configuration options are:
- Select RTL return altitude (RTL_ALT):
- Return at current altitude - Return at current altitude.
- Return at specified altitude - Ascend to specified altitude to return if below current altitude.
Arming Checks {#arming_checks_plane}
Arming Checks are the same as for copter.
Rover
The Rover safety page is shown below.
:::info For additional safety settings and information see: Failsafes. :::
Battery Failsafe {#battery_failsafe_rover}
The rover battery failsafe is the same as for copter.
Failsafe Triggers {#failsafe_triggers_rover}
This panel enables the rover Failsafes.

The configuration options are:
- Ground Station failsafe (FS_GCS_ENABL) - Check to enable GCS failsafe.
- Throttle failsafe (FS_THR_ENABLE) - Enable/disable throttle failsafe (value is PWM threshold below).
- PWM threshold (FS_THR_VALUE) - PWM value below which throttle failsafe triggers.
- Failsafe Crash Check (FS_CRASH_CHECK) - What to do in the event of a crash: Disabled, Hold, HoldAndDisarm
Arming Checks {#arming_checks_rover}
Arming Checks are the same as for copter.
Sub
The Sub safety page is shown below.

:::info For additional safety settings and information see: Failsafes. :::
Failsafe Actions {#failsafe_actions_sub}
The configuration options are:
- GCS Heartbeat - Select one of: Disabled, Warn only, Disarm, Enter depth hold mode, Enter surface mode.
- Leak - Select one of: Disabled, Warn only, Enter surface mode.
- Detector Pin - Select one of: Disabled, Pixhawk Aux (1-6), Pixhawk 3.3ADC(1-2), Pixhawk 6.6ADC.
- Logic when Dry - Select one of: Low, High.
- Battery - ?.
- EKF - Select one of: Disabled, Warn only, Disarm.
- Pilot Input - Select one of: Disabled, Warn only, Disarm.
- Internal Temperature - Select one of: Disabled, Warn only.
- Internal Pressure - Select one of: Disabled, Warn only.
Arming Checks {#arming_checks_sub}
Arming Checks are the same as for copter.